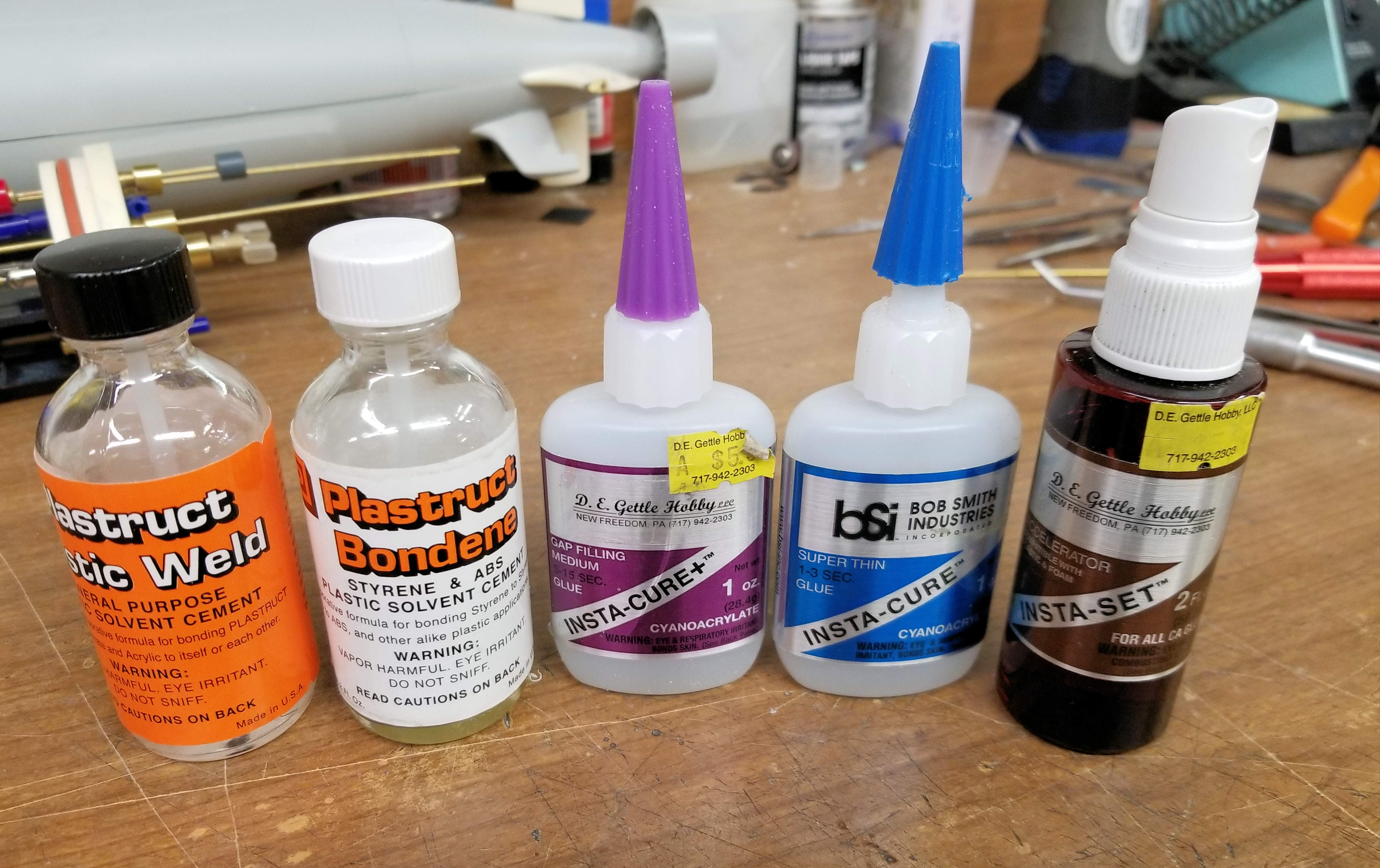
Let’s take a couple minutes to identify a few items that you’ll need to complete this build. First off, adhesives. From left to right:
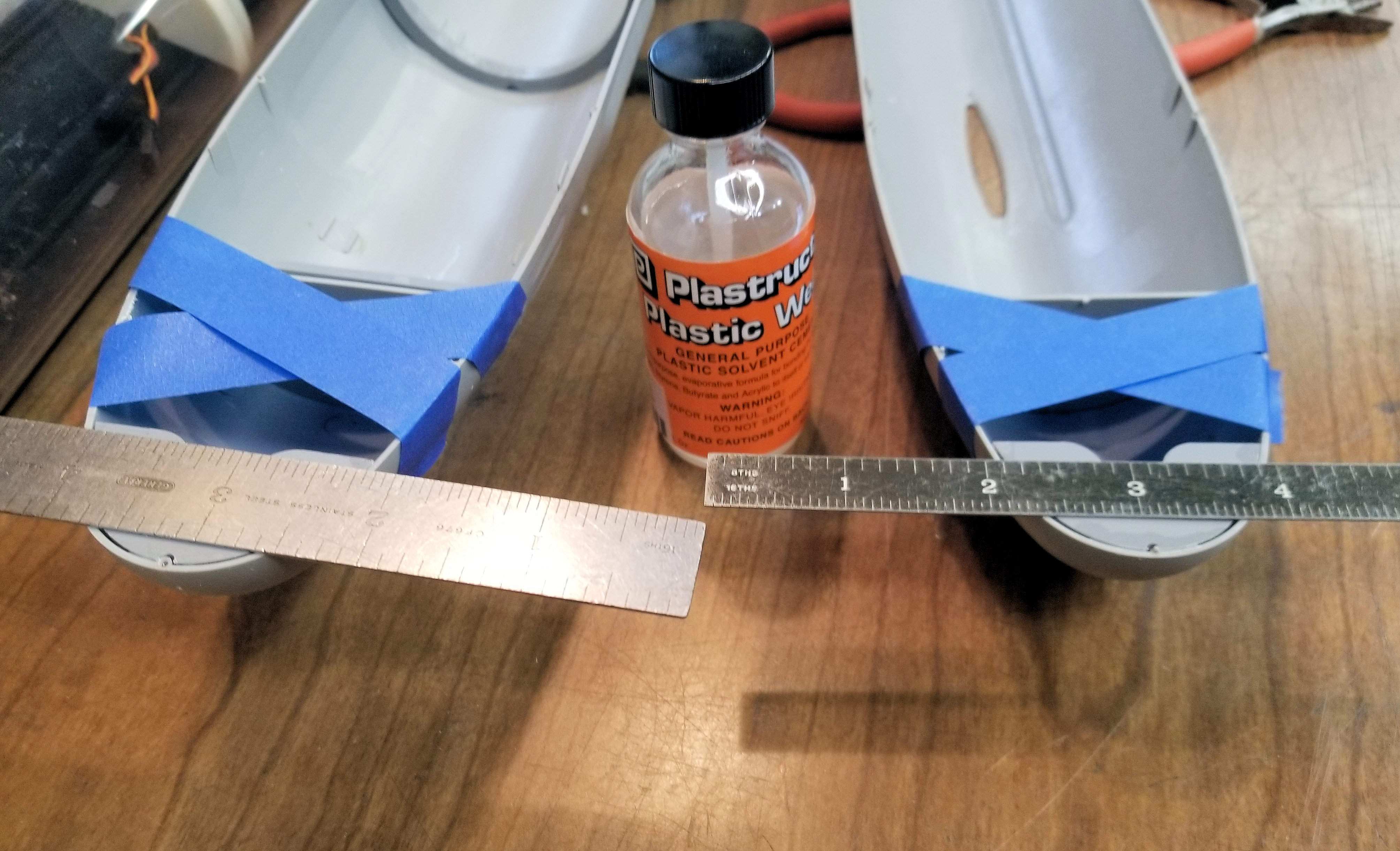
1. Plastruct Plastic Weld cement. This is a general purpose solvent cement used to join dissimilar plastics to each other. This is a necessity for bonding the R&R supplied plastic parts to the Trumpeter styrene parts.
2. Plastruct Bondene. This is a fast acting solvent cement used for joining similar plastics, especially styrene and ABS.It makes quick work of joining the Trumpeter parts to each other.
3. Medium viscosity CA glue, aka “superglue”.Sticks most anything to anything else, especially fingers. The difference between cement and glue is this: glue adheres things to other things by the adhesive properties in it, while cement actually slightly “melts” the items and forms a molecular bond.
4. Super Thin viscosity CA glue.As above, but much thinner.
5. CA accelerator.Used to speed up the solidifying of the CA glues.